Scheduling in Linux
May 29, 2020
Completely Fair Scheduler & Multicore Scheduling
Linux is a beast and a complicated machine, yet in all this, we can still understand certain elements that make up this mammoth.
There are two schedulers, I/O schedulers and Process Schedulers. Usually when talking about schedulers we are refering to Process schedulers. Process schedulers, schedule which processes get control of the CPU.
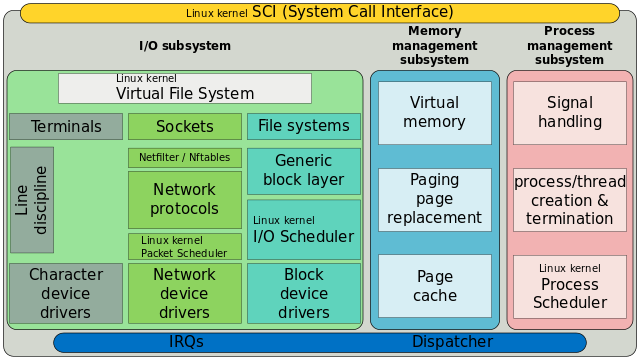
Picture Credits: Wikipedia
Completely Fair Scheduler
Currently Linux uses the Completely Fair Scheduler from Kernel 2.6.23. Previously O(1) Scheduler was used. The CFS Scheduler depends on red-black trees as compared to O(1) which uses queues.
The idea behind CFS is:
- Give timeslices for each program and allocation is based on weightage (aka Niceness)
- Each thread accumulated vruntime which is (runtime / weight)
- When a thread’s vruntime exceeds its assigned timeslice it will be pre-empted.
Implementation of this with red-black trees is:
- Choose left-most tree node. Execute.
- Prempt if it exceeds timeslice. Add to the tree again. Else delete.
- Repeat step 1.
CFS uses a concept called “sleeper fairness”, which considers sleeping or waiting tasks equivalent to those on the runqueue. This means that interactive tasks which spend most of their time waiting for user input or other events get a comparable share of CPU time when they need it.
The fair queuing CFS scheduler has a scheduling complexity of O(log N), where N is the number of tasks in the runqueue. Choosing a task can be done in constant time, but reinserting a task after it has run requires O(log N) operations, because the runqueue is implemented as a red-black tree.
Scheduling in Multi-processor systems
While building a multi-processor system, each processor would require its own run-queue. The moment this is introduced, we now need to balance these run-queues. Due to the fact loadbalancing is expensive, we do this both periodically and in ‘emergencies’ when 1 CPU becomes empty.
Even if we want to redistribute threads we need to think about cache locality of the thread data. The load balancer uses a hierarchical strategy. Each level of the hierarchy is called a scheduling domain. At the bottom level are single cores, groupings in higher levels depend on how the machine’s physical resources are shared.
In the paper, “The Linux Scheduler: A Decade of Wasted Cores” the authors listed 4 bugs which lead to the linux scheduler being patched in 2016.
Share